發布時間:2022-12-05 20:57 人氣:150 來源:handler
目前應用于抽水蓄能電站地形測量的各種傳統測量技術都存在一定缺點,如:全站儀、RTK(Real-Time Kinematic)全野外數字測圖方式的測圖效率低、航空攝影測圖在植被覆蓋區域精度低,而保證地形測量的精度是數字高程模型、數字線劃圖(DLG, Digital Line Graph)等成果生產的重點。特別是在遮擋區域,如植被覆蓋區域高程信息的提取,攝影測量技術由于只能拍到樹木的樹頂、樹冠,導致該區域地表的高程誤差很大,真實的地表高程信息很難精確獲取。傳統的測量方式,也往往因為信號缺失導致此區域測量數據很難獲取。
近年來,三維激光雷達測量技術迅速發展,其具有自動化程度高、受天氣影響小、生產周期短、精度高、成果類型豐富等優點。三維激光掃描測量系統主要由激光掃描單元與定位定向系統(Position and Orientation System, POS)組成。激光掃描單元采集的點云數據必須根據定位定向系統提供的高精度坐標和姿態基準,才能夠將點云投影轉換到真實三維坐標系下。定位定向系統提供的位置、姿態精度以及激光掃描單元的精度決定了三維點云數據中各實物的外形、位置、姿態。定位定向系統通常由慣性測量單元(inertia measurement unit, IMU)、GNSS(Global Navigation Satellite System)基準站和移動站組成。在數據處理時通常對GNSS和IMU數據進行聯合處理使二者形成良好的互補,從而獲得高精度的位置和姿態信息。
激光雷達測量技術能夠全天候直接獲取目標的三維坐標信息,且能夠透過植被間的縫隙獲取地表高程信息,對植被覆蓋區域的地形測量有很大的作用,已廣泛應用于大比例尺地形測繪、應急測繪保障、水利電力與鐵路勘測、輸電線路工程等各個領域。但目前在上述領域中多使用的是體積較大、價格高昂的激光雷達設備,雖然其回波數更多、測距更長,但安裝過程較繁瑣、使用不夠靈活,因此本文以小型機載激光雷達為研究對象探討其在抽水蓄能電站測圖中的應用。
01、數學模型
1.1 DGNSS觀測模型
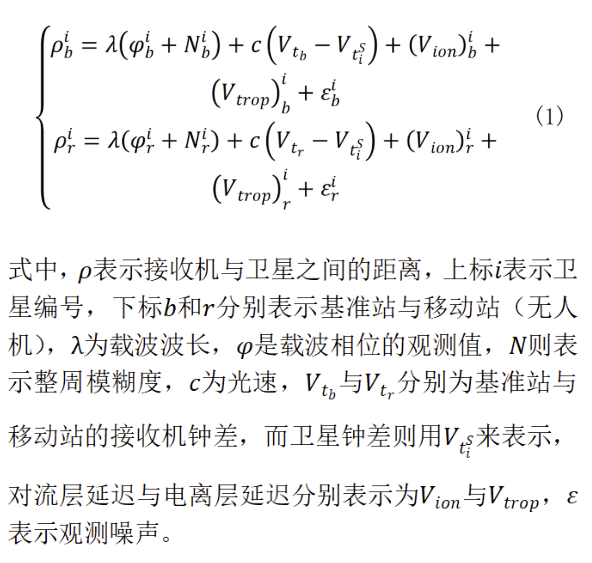
機載三維激光雷達在實際作業時可在無人機起飛區域附近布設GNSS基準站,但因飛馬支持網絡RTK差分服務,可在后處理時下載位于測區附近的虛擬參考站GNSS觀測數據。此時基準站與無人機搭載的移動站之間具有良好的誤差空間相關性。GNSS的誤差,如電離層延遲、對流層延遲、接收機鐘差等都能夠通過站、星間雙差的方式削弱或消除,從而大大減少了待估參數的數量。基準站與移動站單歷元的GNSS原始載波相位觀測方程如下:
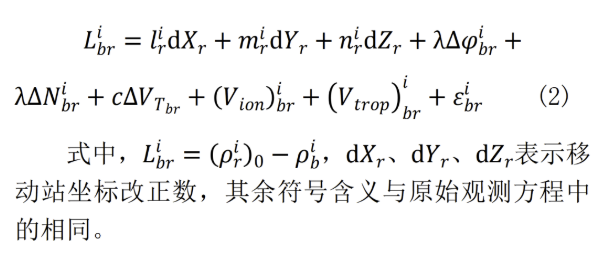
通過將基準站(坐標已知)與移動站的載波相位測量值在接收機間求一次差并線性化過后,得到如下的觀測方程:
從單差觀測方程中可看出,通過在接收機間做一次差能夠消去衛星鐘差,在此基礎上再在基準站與移動站的共視衛星間求二次差后,構建的雙差觀測方程如下:
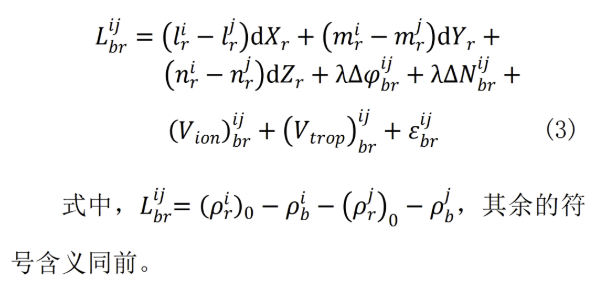
在實際測量時,基準站與移動站之間的距離不超過10km,此時雙差觀測方程受電離層延遲與對流層延遲的影響極小,在解算時無需考慮。
1.2 INS系統模型
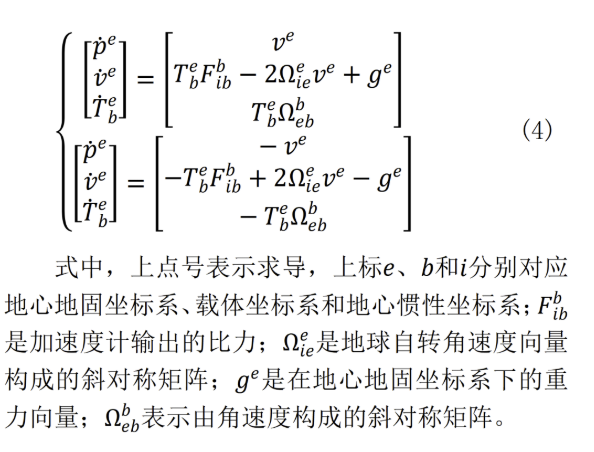
INS (Inertial Navigation System)系統模型包括前、后向慣性導航方程和相應的誤差方程,地心地固坐標系下對位置向量、速度向量以及由載體坐標系到地心地固坐標系的旋轉矩陣求導的前、后向慣性導航微分方程可分別表示為如下形式:
在上式基礎上能夠推導出前向、后向慣性導航誤差方程:
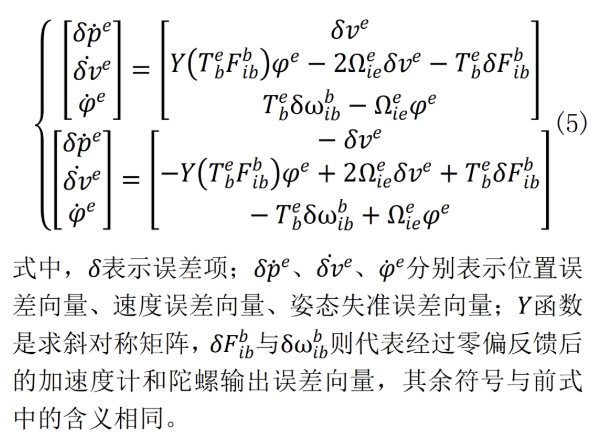
對比前、后向慣性導航方程與相應的誤差方程可看出僅是等式的右邊項變號,但在實際解算時載體的位置、速度以及姿態均無需變號,只是解算時使用到的陀螺和加速度計的輸出不一樣。在前向解算時時刻使用的是該時刻陀螺和加速度計的實際輸出,而在后向解算中圖片
時刻用到的是圖片時刻的陀螺和加速度計輸出。
1.3 DGNSS/INS緊組合前后向平滑模型
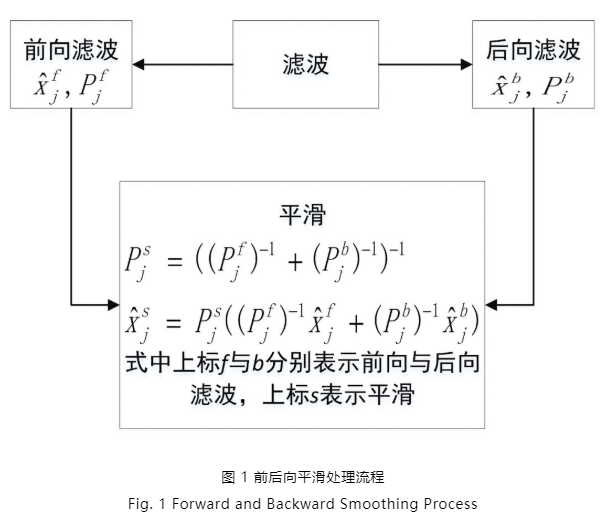
在解算激光點云POS時采用了DGNSS/INS緊組合前后向平滑的數據處理模式,這樣能夠充分發揮INS短時精度高和導航參數完整的優勢。前后向平滑算法主要包括三個過程,分別是:前向濾波、后向濾波,以及平滑。在前向與后向濾波時分別能夠得到對應時刻的前向、后向狀態參數向量以及其協方差陣;而平滑則是將在前、后向濾波中得到的狀態參數向量和協方差矩陣進行加權平滑得到平滑過后的狀態參數向量及其協方差矩陣。前、后向濾波與平滑的大致處理流程見圖1:
2.1 飛馬D2000小型機載激光雷達測量系統
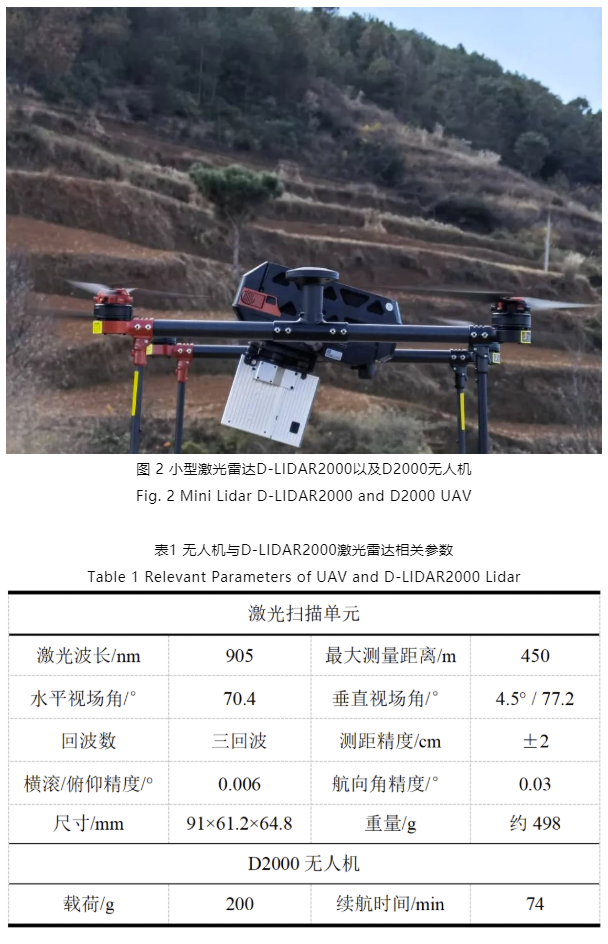
小型機載激光雷達采用的是飛馬機器人科技有限公司的D-LiDAR2000激光雷達,其內置了型號為BMI088的IMU,視場角(Field of View, FOV)約為70°,支持三回波掃描模式,適用于電力、林業、泛測繪、智慧城市等應用場合。無人機為飛馬的多旋翼無人機D2000,該小型激光雷達以及無人機見圖2,D-LiDAR2000小型激光雷達具體參數見表1:
2.2 數據采集
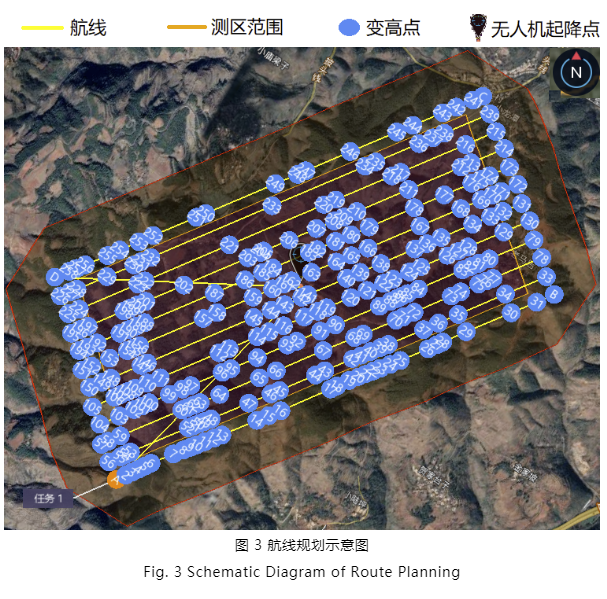
首先使用飛馬無人機管家軟件中的智航線模塊結合測區實際情況進行航線規劃。無人機管家是集數據獲取、處理、顯示管理以及無人機維護的一站式智能GIS系統,包括支持多種類豐富的飛行平臺、能夠滿足各種應用需求的航線模式、支持真三維地形數據的精準三維航線規劃、三維實時飛行監控、快速的飛行質檢、豐富的數據處理工具箱、穩健的精度控制和自動成圖、豐富的4D+三維成果類型、可視化的監控中心、以及系統升級、智能維護、信息推送等云服務。
為避免因抽蓄項目大高差地形的點云數據重疊度不夠而導致點云數據漏洞,航線規劃時將旁向重疊度設置為55%,航線間距87m,飛行速度為12m/s,采用仿地飛行,最終的航線見圖3。
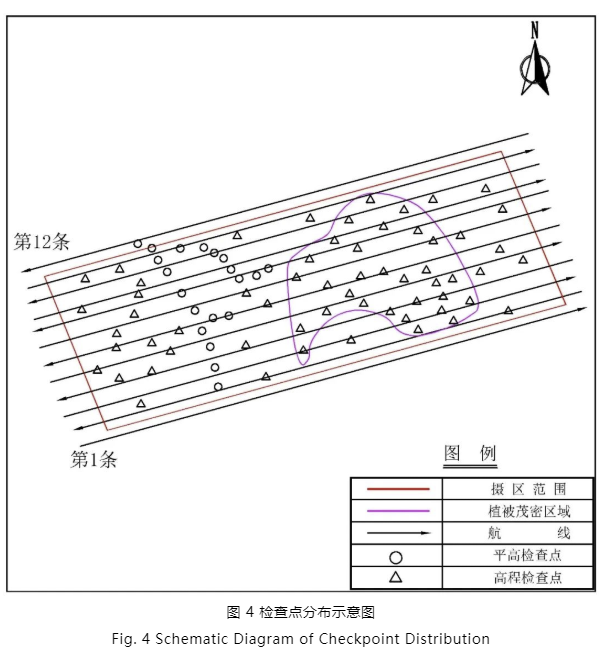
 為確保無人機降落安全,在無人機起飛前連接千尋網絡RTK服務得到起飛位置的固定解坐標,無人機起飛與降落均只需在無人機管家軟件上進行操作。為驗證飛馬D2000無人機搭載D-LiDAR2000激光雷達的測量精度,還在測區內采集了特征檢查點、高程檢查點,用于檢驗平面及高程精度。采集的特征檢查點主要包括:道路轉角、房屋角;高程檢查點主要位于植被覆蓋區域,檢查點分布概略位置見圖4。
為確保無人機降落安全,在無人機起飛前連接千尋網絡RTK服務得到起飛位置的固定解坐標,無人機起飛與降落均只需在無人機管家軟件上進行操作。為驗證飛馬D2000無人機搭載D-LiDAR2000激光雷達的測量精度,還在測區內采集了特征檢查點、高程檢查點,用于檢驗平面及高程精度。采集的特征檢查點主要包括:道路轉角、房屋角;高程檢查點主要位于植被覆蓋區域,檢查點分布概略位置見圖4。
2.3 數據處理
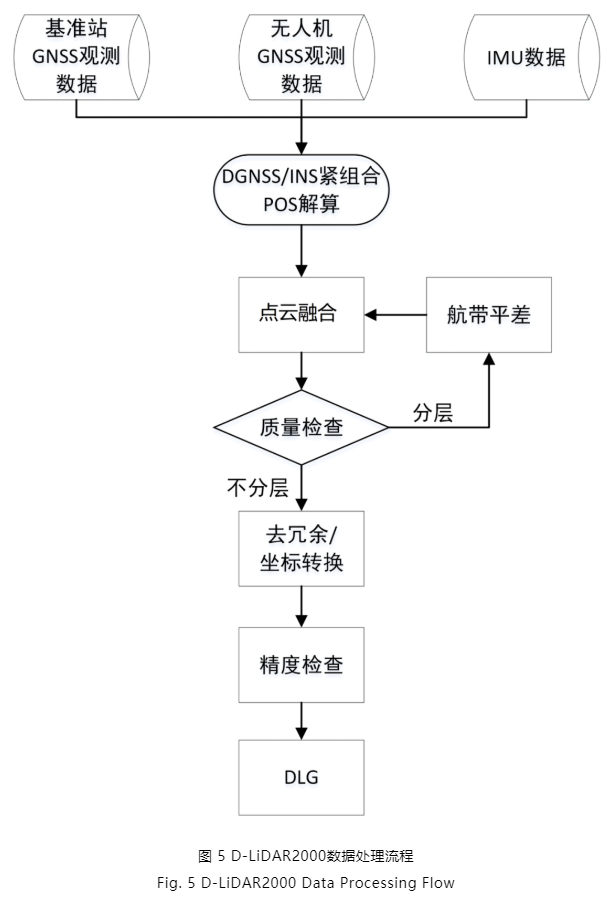
數據處理包括:POS解算、點云融合、質量檢查、去冗余、坐標轉換、精度檢查,最后是根據導出的標準格式點云生產數字線劃圖。數據處理的流程見圖5:
2.3.1 GNSS觀測數據質量分析
GNSS觀測數據質量的優劣會影響POS解算精度,因此分別對虛擬基準站、D2000的GNSS觀測數據進行了數據利用率、周跳比、多路徑效應、以及信噪比(SNR)四個方面的觀測數據質量評估。

由表2可知,在數據利用率方面,基準站與D2000無人機的觀測數據質量均很好,基準站BDS與GPS數據的利用率均為100%;而D2000無人機BDS與GPS的數據利用率都在98%以上。在周跳比方面,二者均低于1,符合規范要求。無論是基準站還是D2000無人機BDS與GPS的多路徑誤差均低于25cm,其中GPS最大的多路徑誤差MP2為24.1cm,BDS最大的多路徑誤差MP2為10.8cm。整體來看,BDS系統各個頻段的多路徑效應與GPS相當。SNR反映了接收機收到衛星的質量,由表2可知,D2000無人機GPS與BDS的SNR均接近41,兩個系統沒有表現出明顯差異。通過上述分析,驗證了基準站與D2000無人機GNSS觀測數據質量均良好。
2.3.2 POS解算
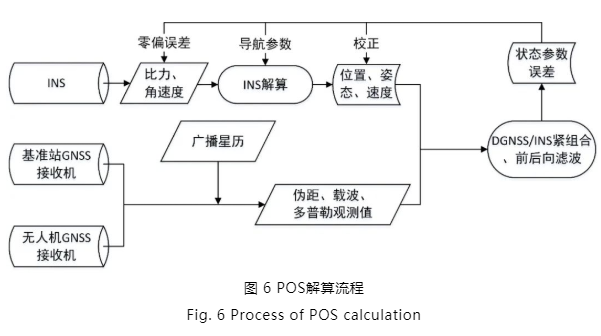
POS解算時采用GPS/BDS雙系統,解算時將GPS/BDS雙差觀測方程中的模糊度參數和慣性器件誤差以及無人機的運動狀態誤差列為濾波器的狀態變量。輸入的原始數據包括IMU輸出的比力和角速度信息,測區附近架設的GNSS接收機和無人機搭載的GNSS接收機輸出的原始偽距、載波相位和多普勒觀測值以及數據采集期間的廣播星歷。通過DGNSS/INS緊組合前后向平滑解算得到POS的位置、速度和姿態,詳細的數據處理步驟見圖6:
無人機搭載的GNSS接收機與基準站GNSS接收機之間平均每歷元GPS、BDS的合計共視衛星數為17顆,且基準站與航線最遠相距1.8km,空間誤差相關性強。
經解算有104個歷元(20 HZ的采樣率)前后向平滑均無法實現固定,具體固定情況見圖7。
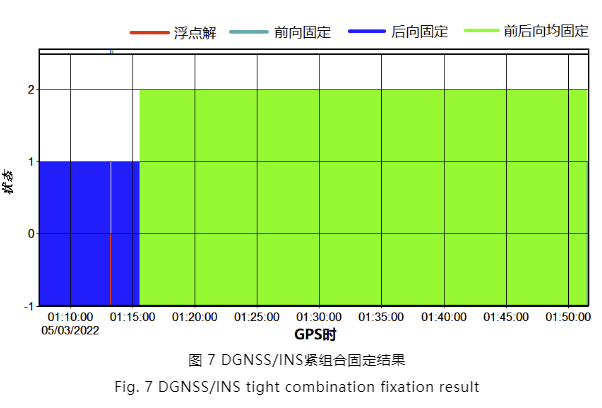 通過分析無人機D2000接收到的衛星數以及PDOP(position dilution of precision)發現:由于無人機在起飛初始階段短時間內接收到的衛星數急劇降低導致PDOP值變大,從而無法獲得固定解,衛星數與PDOP分別見圖8、圖9。
通過分析無人機D2000接收到的衛星數以及PDOP(position dilution of precision)發現:由于無人機在起飛初始階段短時間內接收到的衛星數急劇降低導致PDOP值變大,從而無法獲得固定解,衛星數與PDOP分別見圖8、圖9。
 從無人機起飛到降落一共有53100個歷元,前后向均無法固定的歷元數僅為104,僅約占總歷元數的0.2%,持續時間僅為5.2秒,且未固定的歷元在起飛階段,所以并不影響后期測區內點云融合的精度。最終解算得到的POS位置以及姿態精度分別見圖10、圖11。
從無人機起飛到降落一共有53100個歷元,前后向均無法固定的歷元數僅為104,僅約占總歷元數的0.2%,持續時間僅為5.2秒,且未固定的歷元在起飛階段,所以并不影響后期測區內點云融合的精度。最終解算得到的POS位置以及姿態精度分別見圖10、圖11。
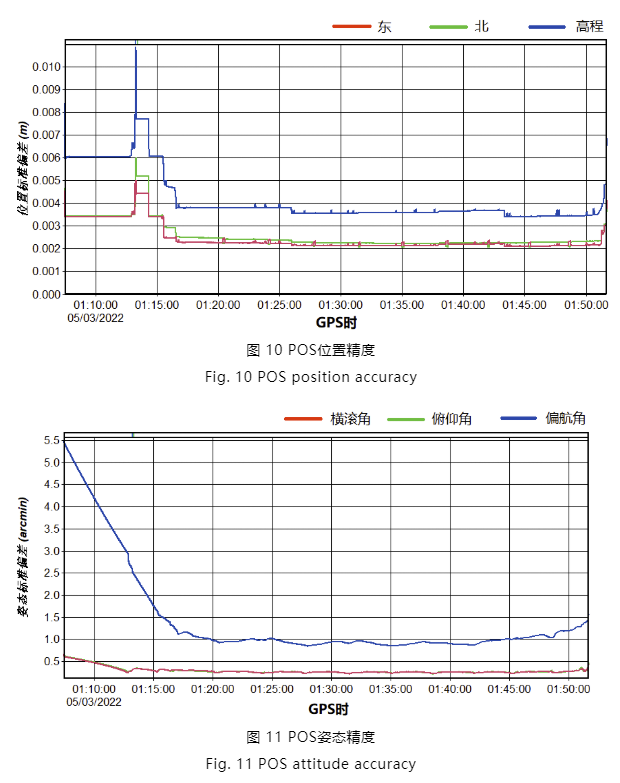
由圖10與圖11可以看出,無人機僅在起飛初始階段位置與姿態精度有波動,而在作業平穩飛行期間精度高。其中,在作業平穩飛行期間東、北方向的位置精度均在0.3cm內,高程方向精度在0.4cm以內。姿態精度中橫滾、俯仰角具有高度的一致性,在數據采集期間二者精度均在0.5弧分內,偏航角精度在數據采集期間在1弧分內。
表明了飛馬D2000 20hZ高采樣率GNSS觀測數據以及IMU數據的優越性,且在點云POS解算時采用的DGNSS/INS緊組合的解算模式,可充分利用INS短時高精度的優勢,使得GNSS與INS形成良好互補,有效確保了解算的POS精度,并使其能夠滿足點云融合的需求。
2.3.3點云融合
基于解算得到的POS數據即可將激光掃描單元所獲得的原始點云數據進行融合,并可將融合后的點云數據轉換到實際所需坐標系下。在實際數據處理時,只需將POS以及原始點云數據導入到飛馬無人機管家中的智激光模塊即可完成點云融合、坐標轉換、導出標準點云等步驟。最終融合后的點云數據按高程渲染的結果見圖12。
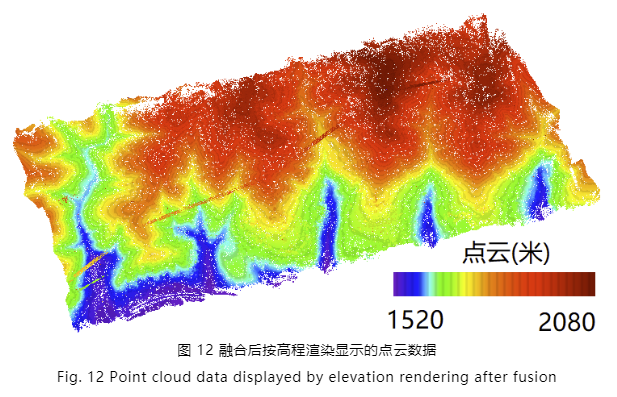
融合后的點云數據在單航帶區域平均密度為33.1個/m2,在兩條航帶間的公共區域平均密度為142.3個/m2,整個測區的平均點云數據平均密度為87.7個/m2,滿足機載激光大比例尺地形圖成圖對于點云數據密度的要求。
2.3.4點云濾波與植被透過性分析
機載LiDAR采集到的點云是混合了地面點和非地面點的三維測量點集,需要進行點云濾波準確地將反映地形特征的地面點與反映地物特征的非地面點進行區別歸類。選擇的濾波算法是基于不規則三角網(Triangulated Irregular Network, TIN)的漸進加密濾波算法,該算法克服了傳統算法只針對某些特定的連續表面區域有效的局限性,對于復雜的山區地形點云數據具有良好的適用性。在進行濾波時首先選擇種子點,將區域內的點云劃分成單位間距較大的規則格網,尋找每個格網中的最低點作為初始種子點,基于此點生成一個稀疏TIN;然后將滿足閾值條件的點不斷加入逐步對TIN加密;如此迭代處理逐層加密,直到遍歷完所有的點,從而把原始的點云數據分為地面點和非地面點。濾波完成后通過拉剖面的方式分析點云植被的穿透性,見圖13:
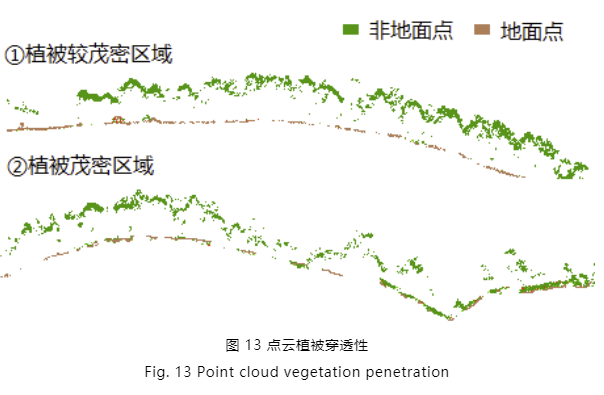 由圖中可看出該小型機載激光雷達植被透過性較好,其能夠有效透過覆蓋較茂密的植被,獲取到大量的地面點云數據;雖對于茂密的植被區域其透過性略差,但仍有少量的地面點。
由圖中可看出該小型機載激光雷達植被透過性較好,其能夠有效透過覆蓋較茂密的植被,獲取到大量的地面點云數據;雖對于茂密的植被區域其透過性略差,但仍有少量的地面點。
 QQ客服
QQ客服