發布時間:2022-12-05 20:47 人氣:130 來源:handler
地形改正是重力勘探工作中重要的一項改正工作,其中近區(重力測點周圍0-20m)地形起伏變化,對測點重力觀測值的影響最大,要想得到高精度的重力數據,近區地形改正的精度在整個地形改正中占有重要的比例。目前近區地形改正主要采用RTK、森林羅盤儀和激光測距儀來完成,其中RTK和森林羅盤儀的精度較高,但費時、經濟成本高,僅有激光測距儀精度、經濟成本比較適中。WorldDEM數據產品及1:1萬的數字地形數據僅能滿足1:5萬重力調查近區地形改正的精度要求。
機載LiDAR系統能全天候高精度、高密集度、快速和低成本地獲取地面三維數字數據,已在電力、公路建設、道路勘查、環境調查等多個領域中廣泛的應用。大比例尺重力勘查工作的近區地形改正在工作效率和精度上取得雙重進展,無人機航測的應用是必然的趨勢。
01、項目概況
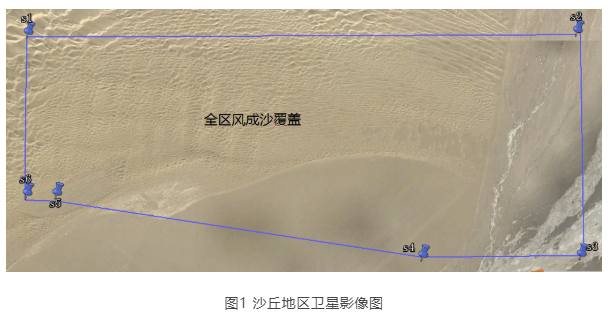
沙丘位于青海省的西部,青藏高原的東北部,隸屬于柴達木盆地的西南緣干旱荒漠化草原區域,,地表均為風成砂覆蓋,覆蓋厚度200-300m,起伏不大但常年變化,為移動沙丘。地表無任何植被覆蓋(圖1)。位于東經92°46′30″-92°55′32″,北緯36°52′59″-36°55′33″,面積為72km2。
在沙丘開展1:2.5萬重力勘查工作,為了加快項目進度,提高近區地形改正的精度,通過調研和比較,LiDAR能滿足1:5000,1:2000甚至更大比例尺的精度要求。最終項目使用深圳飛馬機器人科技有限公司的飛馬D2000智能航測系統,取得了良好的應用效果。
02、DEM數據的獲得及精度評價
2.1 儀器設備
本次工作采用的D-LiDAR2000激光雷達模塊適配于飛馬機器人公司生產的D2000無人機系統,采用TOF測距模式,回波數為三回波,測距精度±2cm,標稱精度5cm@50,高差定位精度3cm,航向角精度0.03°。
2.2 外業數據采集
外業飛行作業獲得的點云數據是基于測區已有控制點,架設GPS靜態基站,求算坐標轉換七參數,把成果數據轉換到項目所需的目標坐標系。選好合適起飛點后,按照預定航線飛行,與普通航測不一樣的是由于原理是激光回波,并不局限于光照強度等因素影響,即陰天或晚上也可以作業,有利也有弊,這也使得大面積水面或地物表面覆蓋太多水跡會影響成果,避開雨天就好。
2.3 數據處理
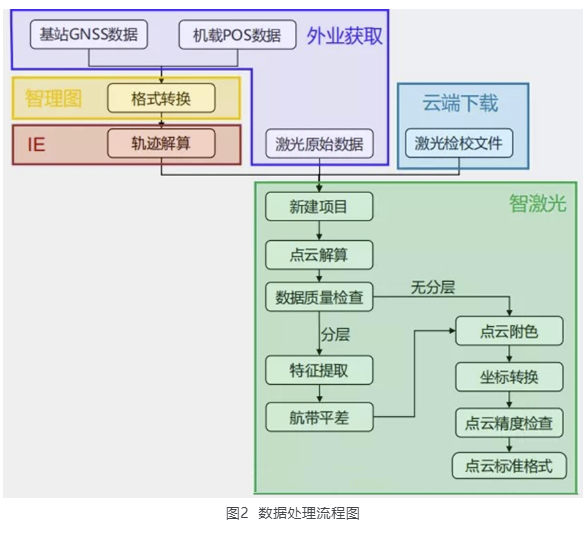
外業得到的數據主要用到飛馬無人機管家中的智理圖、智激光、智點云模塊和IE(Inertial Explorer)來進行處理(圖2),內業處理流程主要包括數據預處理、數據后處理、成果輸出。
2.3.1預處理處理
(1)軌跡解算
在IE里將外業獲取到的基站數據和機載數據進行緊耦合差分軌跡解算,解算完成后進行預計位置和姿態的精度檢查。當位置精度值小于0.02,姿態精度值小于3時滿足精度。
(2)點云解算
在無人機管家的智激光模塊中,用上一步解算好的軌跡文件和下載的激光數據進行點云解算。
解算后且精度滿足后,則進行坐標轉換,這里根據項目需求,使用我們外業采集的檢查點進行求七參,使用七參進行轉換。轉換完成后則進行檢查點云位置是否正確,是否有懸浮點。
2.3.2點云后處理
經過去噪、地面點分類(提取結果只顯示兩類,一類為地面點,一類為非地面點)、地面點過濾、構建三角網。最終得到點云數據,作為機載LiDAR系統測量的最終成果。
2.3.3成果輸出
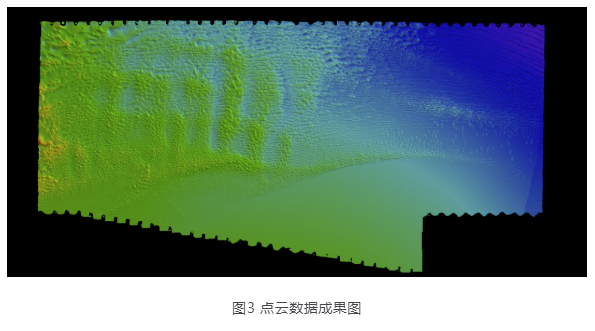
手動分類完成后,就可以進行類別提取、高程提取、DEM以及等高線等成果輸出,下圖為點云截圖。
2.4 精度檢查與評價
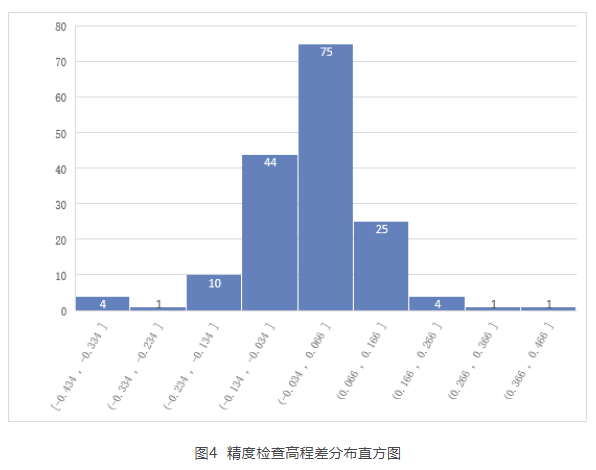
通過外業實測與機載LiDAR航測的成果進行精度比對,從工作區抽取165個測點,大致均勻分布于工作區,再利用處理軟件對點云數據進行了精度檢查,高程差分布情況圖4所示,最小值-0.434m,最大值0.416m,平均值-0.009m,高程中誤差:0.149m。高程差主要分布于-0.234m~0.166m,總個數為154個,占質檢總數的93.3%。個別點的差值較大,分析其主要原因是沙漠地形隨氣候(主要是大風)發生變化,實測點的時間與航測的時間間隔越大時,個別區域的沙丘發生了較大的移動,從而導致個別點差值就很大。
03、重力近區地形改正值的計算
3.1 DEM數據處理
機載LiDAR得到的是點云數據,數據量巨大,對計算機的要求等都提出了很高的要求,其次是不能直接進行近區地形改正的計算,為了提高計算速度而又不失精度的方法,于是將點云數據導出成1m×1m的網格(.grd)數據,以便后期進行地形改正的計算。
3.2 近區地形改正值的計算
3.1.1 近區地形改正方法
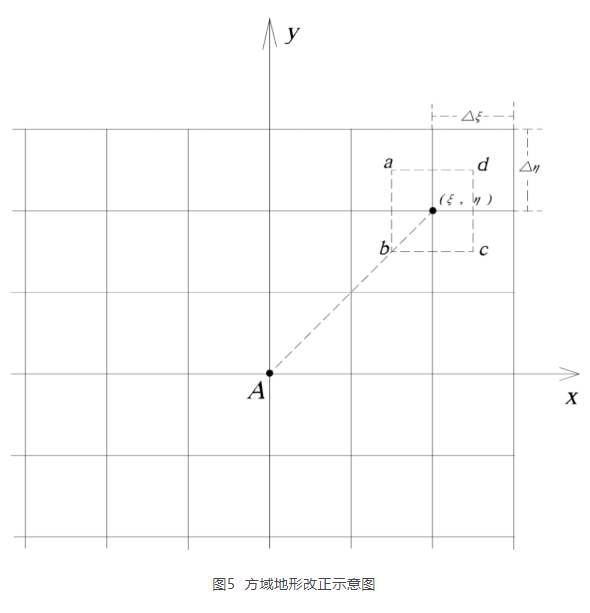
重力地形改正值的計算采用“共用點法”也稱平移高程法(該方法用于中-遠區地形改正),方域范圍改正。即將實際地形分割成四棱柱體(本次為1m×1m),每個網格節點代表其中一個(圖5),四棱柱體的高度為網格節點的值,計算每一個四棱柱體在測點的地形影響值,再將所有四棱柱體對測點的地形影響值相加,即為該重力測點的近區地形改正值。圖中所示的abcd方柱對A點的地形校正值為:
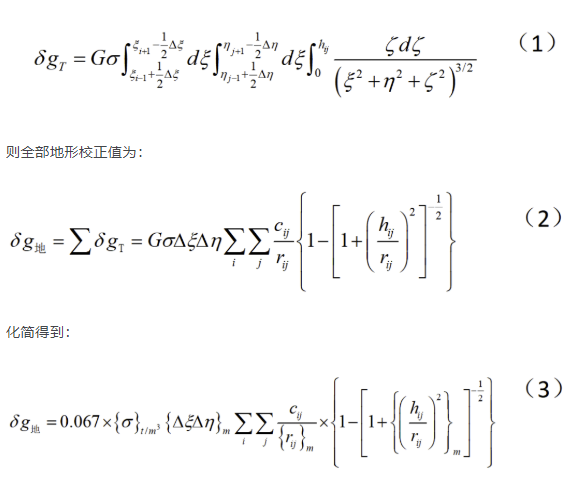
式中rij為測點A到節點(ξ,η)的距離,hij為該方柱高程與A點高程之差,cij為數值積分時用的節點系數。
3.1.2 近區地形改正值計算
基于MATLAB軟件平臺,依據(3)式計算公式,編寫了近區地形改正計算程序。將得到的網格數據(.grd)和測點的三維坐標讀入到計算程序中,再進行計算,導出計算結果(近區地形改正值)。
3.3 近區地形改精度的評價
工作區內的3799個測點,采用無人機激光雷達航測的DEM數據全部進行了改正。與RTK測量模式實測的地形改正值對比。實測近區地形改正值與航飛DEM計算的地形改正值最大差值為0.0315×10-5m/s2,最小差值為-0.0296×10-5m/s2;平均值僅為-0.0052×10-5m/s2,均方誤差為±0.0067×10-5m/s2,優于文獻18中II級地形等級的近區地形改正的精度(±0.012×10-5m/s2)要求。
04、結論
(1)機載LiDAR工作效率高、成本低、精度高。適合在青藏高原植被稀少,地形起伏大的地區進行工作。
(2)在沙漠地形中,機載LiDAR系統的測量成果不論是從高程的中誤差還是計算得到的近區地形改正值,均能滿足大比例尺重力勘探的技術要求。克服了RTK在復雜地形條件下受地形遮擋,沒有信號或信號不強不能進行地形改正測量的難題。
(3) 機載LiDAR系統的測量成果在重力勘查近區地形改正中的應用,不僅提高了重力勘查近區地形改正的工作效率,而且還提高了近區地形改正的精度。在今后的重力勘查近區地形改正中有著廣泛的應用前景。
 QQ客服
QQ客服