發布時間:2022-12-05 20:41 人氣:280 來源:handler
01、引言
無人機測繪是無人機遙感的一種特殊用途,主要通過無人機對目標區域進行航空攝影,然后利用地面處理系統對數據進行處理,最終制作出目標區域的正攝影像圖、數字地形圖以及三維地物模型。隨著科學技術的進步,無人機技術已經有了較大的發展。在現代測繪中,無人機測繪顛覆了傳統測繪的作業方式,尤其在大比例尺測圖方面。無人機發展初期,LiDAR技術的發展使得大比例尺測圖出現新的發展趨勢,但是由于生產設備昂貴、操作復雜、數據冗余等原因使得此方法沒有得到迅速推廣。新的匹配算子(SIFT、Mesh)與平差算法(RANSAC、L-M、C-G、SFM)的出現,使得自動化無人機軟件得以普及,常規的軟件如PI4DMapper、PhotoScan、INPHO、Smart3D等,這些軟件可以基于影像數據匹配生成點云數據。本文研究對無人機匹配的點云數據進行抽稀、去噪、分類等工作,自動生成DLG數據。通過與實測檢查點的數據對比,得出精度分析數據。高程與平面精度均滿足國家規范要求,此方法可以提高工作效率,節約生產成本。
02、無人機影像匹配點云技術
無人機測繪的目標是通過無人機獲取目標區域影像進而獲取目標區域的三維地理信息模型。三維地理信息模型包含豐富的內容,而目標區域的三維地形信息是重要內容之一。三維地形通常通過大量地面點空間坐標和地形屬性數據來描述。密集匹配是通過攝影測量基本原理中同名點前方交會得到地面點坐標的思想,在空中三角測量結果的基礎上,通過各種匹配算法獲得測區密集點云的一種方法,其特點是可以生成密度非常高的地面點。常用的影像匹配方法有兩種:(1)基于像方灰度的匹配算法,如相關系數法、相關函數法、協方差函數法、差平方和法、差絕對值和法、最小二乘影像匹配法;(2)基于特征匹配的算法,如金字塔多級影像匹配算法、SIFT算法等。無人機攝影測量技術軟硬件設備發展迅速,使得影像獲取更為便捷,計算機視覺重建技術的進步,提高了無人機影像匹配點云技術的質量和精度。無人機影像數據預處理后通過密集匹配得出的三維點云,數據集保留了目標場景的紋理與色彩信息,但無人機點云不含有LiDAR點云數據所包含的強度、回波等信息。如何從無人機點云數據中分離出地面點與非地面點,是重點的研究對象。
03、工程實例
3.1工程概況
引哈濟黨調水工程的任務是將蘇干湖水系的大哈爾騰河河水調至黨河流域,主要解決敦煌月牙泉及西湖國家自然保護區的生態用水和阿克塞縣城生活生產用水。引哈濟黨調水工程主要包括取水樞紐、輸水管道、輸水隧洞、梯形明渠、暗涵等輸水建筑物。設計最大引水流量12.0m3/s,年調水量為1.0億m3,調水期為4~9月。
該工程可行性研究階段需要對線路沿線進行1:2000大比例尺帶狀地形圖測繪工作,面積約800平方公里,范圍如圖1所示。

圖1 引哈濟黨測圖范圍
引哈濟黨調水工程行政區劃位于酒泉市敦煌、阿克塞和肅北三縣(市),其中調水區位于阿克塞縣境內的建設鄉的全部以及團結鄉的大部分,收水點為阿克塞縣調蓄池及黨河水庫。測區屬于戈壁丘陵地形,線路經過的黨金山海拔約3500米,整個測區高差達到1000米以上。測區氣象條件復雜,工期緊張,采用飛馬垂直起降固定翼無人機V100進行作業。
3.2實施方案
本次航測數據采集使用V100無人機航空攝影測量系統進行作業,搭載SONY RX1R II系列數碼單反相機。整個測區劃分為16個架次,設計測區相對行高940m,航向重疊度為80%,旁向重疊度為65%,影像分辨率為0.15m,分區進行處理。主要參數如表1和表2所示。

04、數據預處理
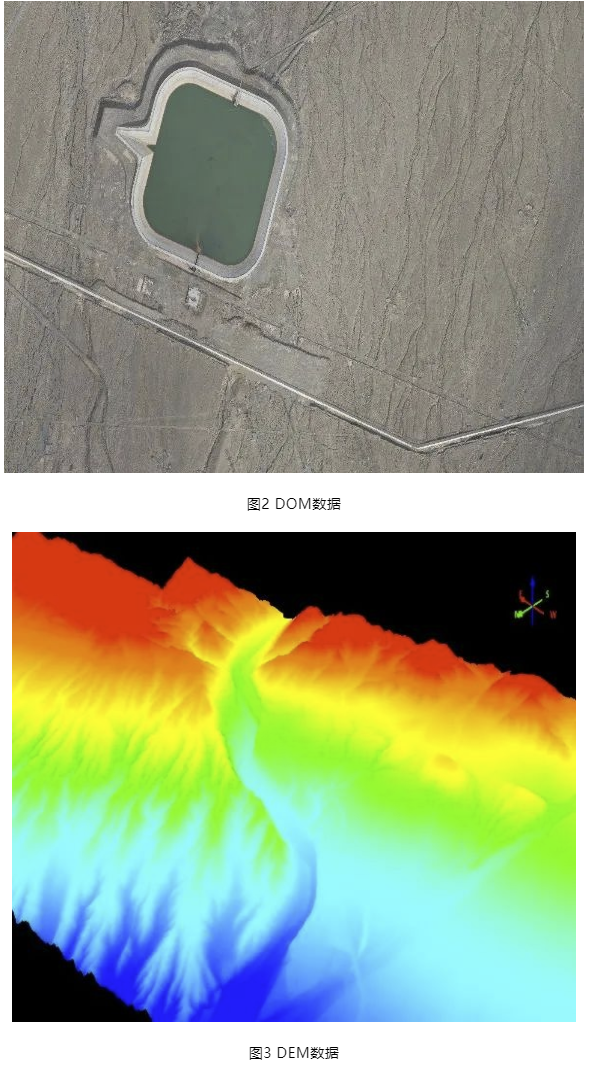
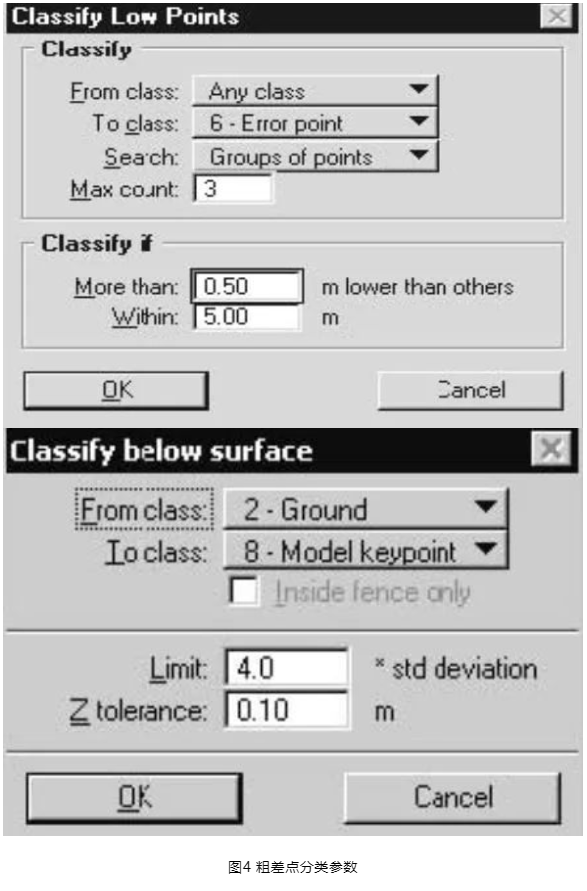
PhotoScan是俄羅斯公司Agisoft開發的一款基于影像自動生成高質量三維模型的優秀軟件。PhotoScan無須設置初始值,無須相機檢校,它根據最新的多視圖三維重建技術,可對任意照片進行處理,無需控制點,而通過控制點則可以生成真實坐標的三維模型。利用V100無人機航空攝影測量系統獲取的影像經過軟件處理,生成點云、DOM、DEM。如圖2、圖3所示,生成的測區數字產品色彩鮮艷、紋理清楚。
05、匹配點云數據處理
由于鏡頭畸變、相片質量、匹配誤差等因素的影響,無人機影像匹配的點云數據存在大量的噪點、邊界模糊區域、水面漏洞等狀態。點云的處理、濾波關系到最終產品的精度高低。
5.1點云粗差的處理
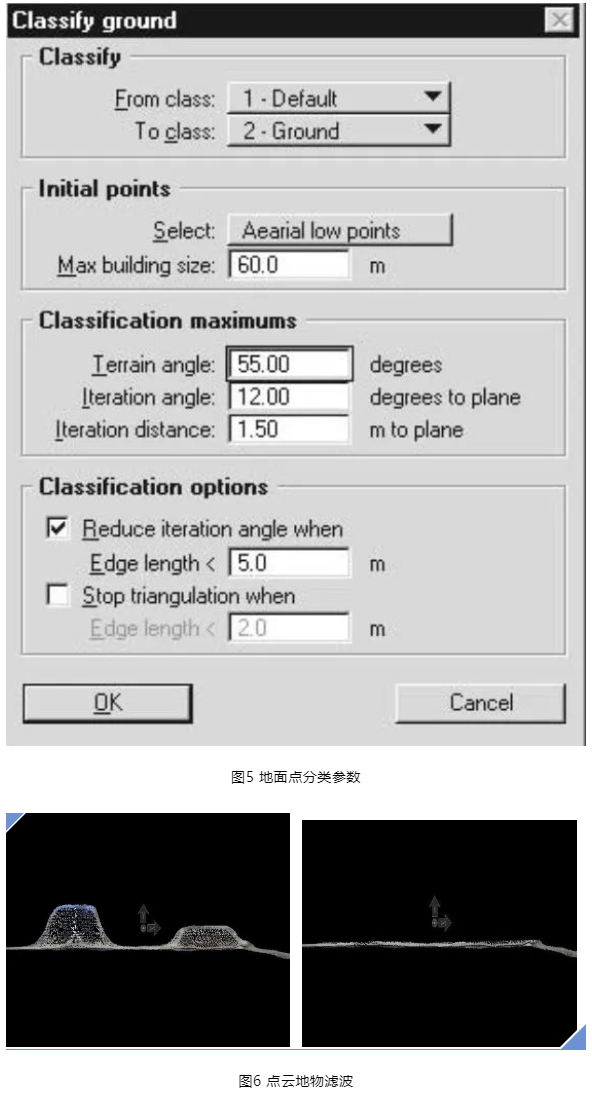
點云處理采用TerraSolid軟件進行,TerraSolid軟件系列是第一套商業化LiDAR數據處理軟件,由總部位于芬蘭赫爾辛基的TerraSolid Oy公司開發。TerraSolid軟件的主要模塊是基于Microstation開發的插件系統,運行于Microstation系統之上,其中主要包括:TerraMatch、TerraScan、TerraModeler、TerraPhoto等模塊。TerraSolid軟件系列能夠快速的載入點云數據。其中的TerraScan模塊用來處理數以千萬計的點云數據。從生成的點云數據高程角度分析,粗差點高程大致分為兩種。一種為明顯高于或低于目標區域地物高程點的點云異常點,另一種為局部地區異于臨近地物點的點云異常點。在載入無人機點云數據后,通過設置不同的參數,分類出低于地面的點和孤立點,剔除這些明顯的粗差點。在此基礎上,分類出關鍵模型點,通過計算,此時的點云數據已經沒有明顯的粗差點,可以進行分類地面點的工作。
5.2點云數據分類與信息的提取
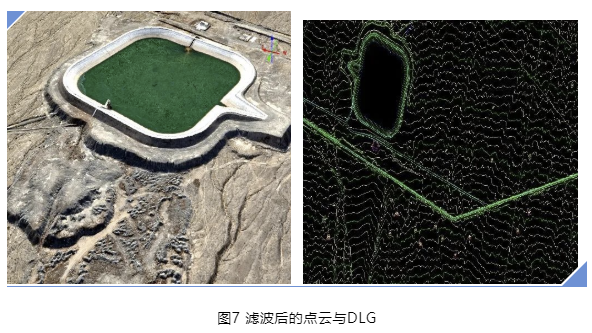
利用TerraScan模塊中的地面點分類功能進行數據的分類與信息的提取,可通過設置參數,先進行建筑物、道路等硬表面點的提取與分類,利用植被指數功能進行植被的濾波提取,最后分類出地面點,并對分類后的地面點進行平滑處理。對于因為參數設置殘留的未分類的點,采用人工干預分類的方式,進行分類。最后利用清華山維EPS與CASS軟件進行DLG數據的生產加工,最終生產1:2000比例尺DLG數據。
06、精度分析
判讀成圖精度是否滿足國家規范要求,是驗證成圖方法的必要環節。為了驗證數據精度,需要計算生產數據與實測檢查點的平面與高程中誤差。
式中,m表示數據中誤差,圖片表示檢查點的不符值,n表示評定精度的點數。
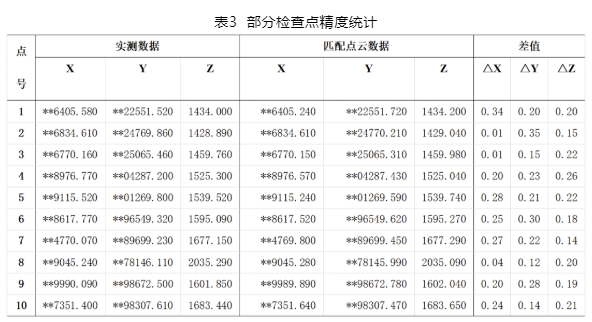
檢查點利用RTK實測采集,主要采集線路關鍵位置的地物與地貌點,均勻分布在每個區塊中。經過統計計算,平面中誤差為0.22m,高程中誤差為0.32m。對比《低空數字航空攝影測量內業規范》,生產精度滿足規范要求。部分精度統計如表3所示。
07、結語
本文通過對無人機匹配點云數據特點的研究并結合LiDAR點云數據處理技術,對匹配點云數據進行處理分析,成功分類出目標區域的地面地物信息,并生產出符合國家規范要求的數字產品。作為一項新的航空攝影測量技術手段,隨著軟件、硬件的提升與數據處理技術的不斷完善,無人機影像點云處理技術在水利水電、城市規劃、土地調查、交通設計等工程項目中會起到更加積極的作用。同時如何真正運用無人機點云處理技術準確分類出地面點信息,濾波各參數如何選擇等問題,還有待于在不同項目中積累、探索和研究。
 QQ客服
QQ客服